算丰征途无人车拒止条件定位技术-塑造未来战场的新维度
导言:
在现代战争的版图上,技术的革新不断推动着战术和战略的演变。其中,无人车辆作为军事力量的重要组成部分,其发展和应用受到了极大关注。随着全球定位系统(GPS)/北斗在军事领域的广泛应用,依赖GPS的定位技术已成为常态。然而,在拒止环境——即敌方通过电子战等方式干扰或破坏GPS/北斗信号的战场条件下,传统的定位技术面临巨大挑战。因此,开发拒止条件下的无人车自主全局定位技术成为了引领未来战场新方向的关键。

一、无人车自主全局定位技术的必要性
在拒止环境下,无人车辆无法依赖外部信号进行有效定位,这要求它们必须具备高度的自主性。算丰征途开发的自主全局定位技术使无人车辆能够在没有外部信号支持的情况下,通过内置传感器和算法实现自我定位与导航。算丰征途无人车自主全局定位技术不仅提高了无人车辆的生存能力和作战效率,还为指挥官提供了更多的战术选择。

二、技术原理与实现方式
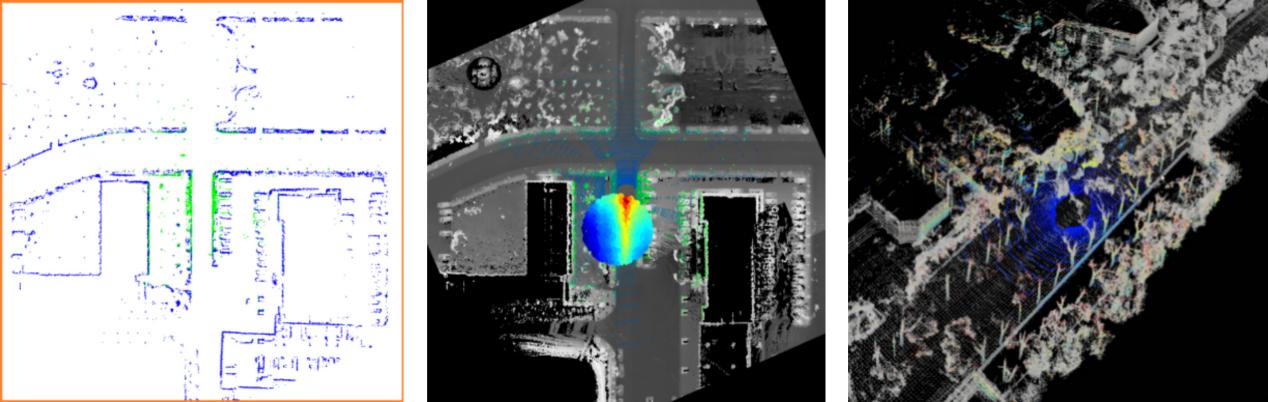
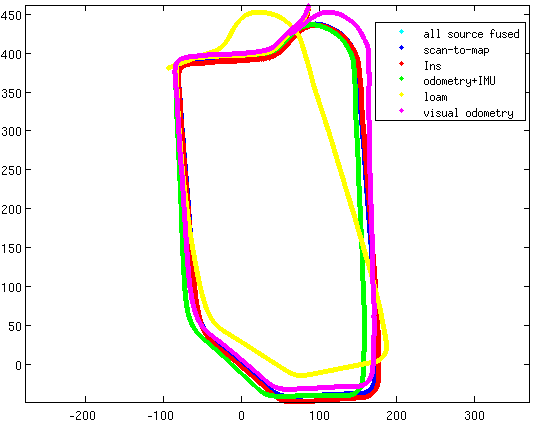
算丰征途无人车自主全局定位技术通常依赖于多种传感器的融合,如惯性测量单元(IMU)、激光雷达(LiDAR)、摄像头和雷达等。这些传感器收集的数据通过复杂的算法进行处理,以构建周围环境的三维地图,并在此基础上实现定位。

1. 惯性导航系统:利用加速度计和陀螺仪测量无人车辆的运动状态,通过积分计算得到位置信息。
2. 视觉里程计:通过分析连续的图像帧,追踪特征点来计算无人车辆的相对移动。
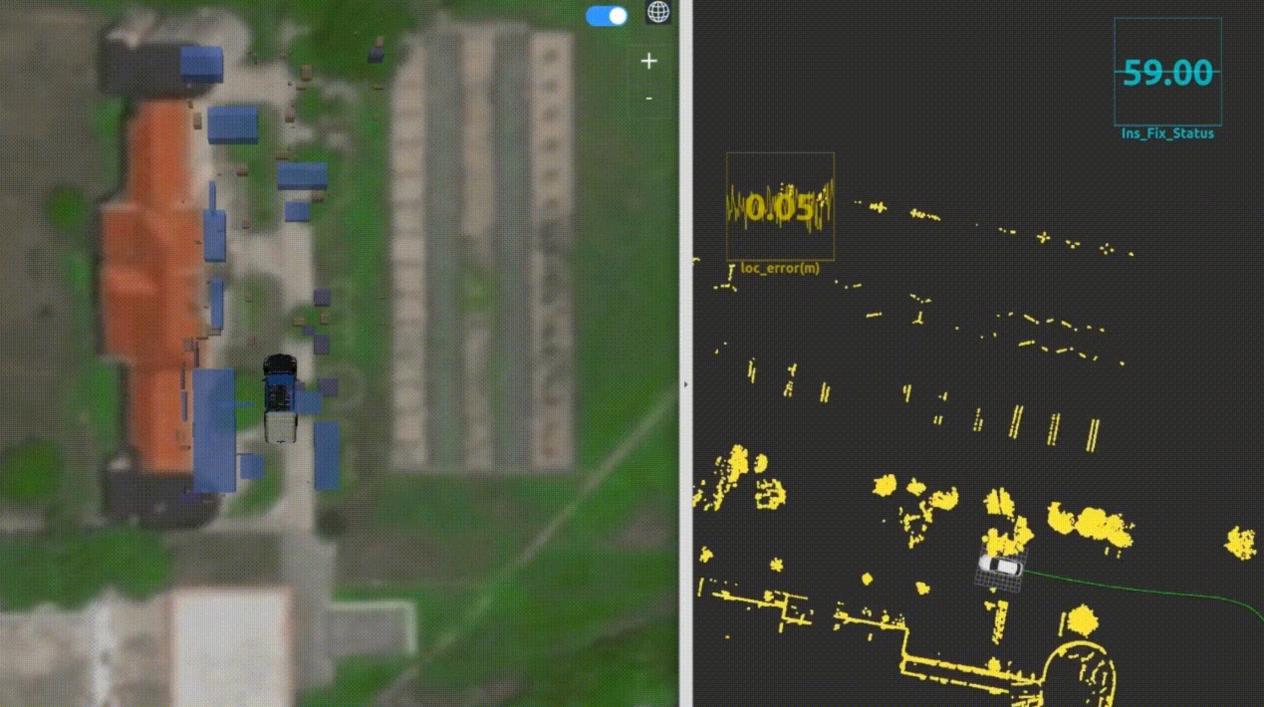
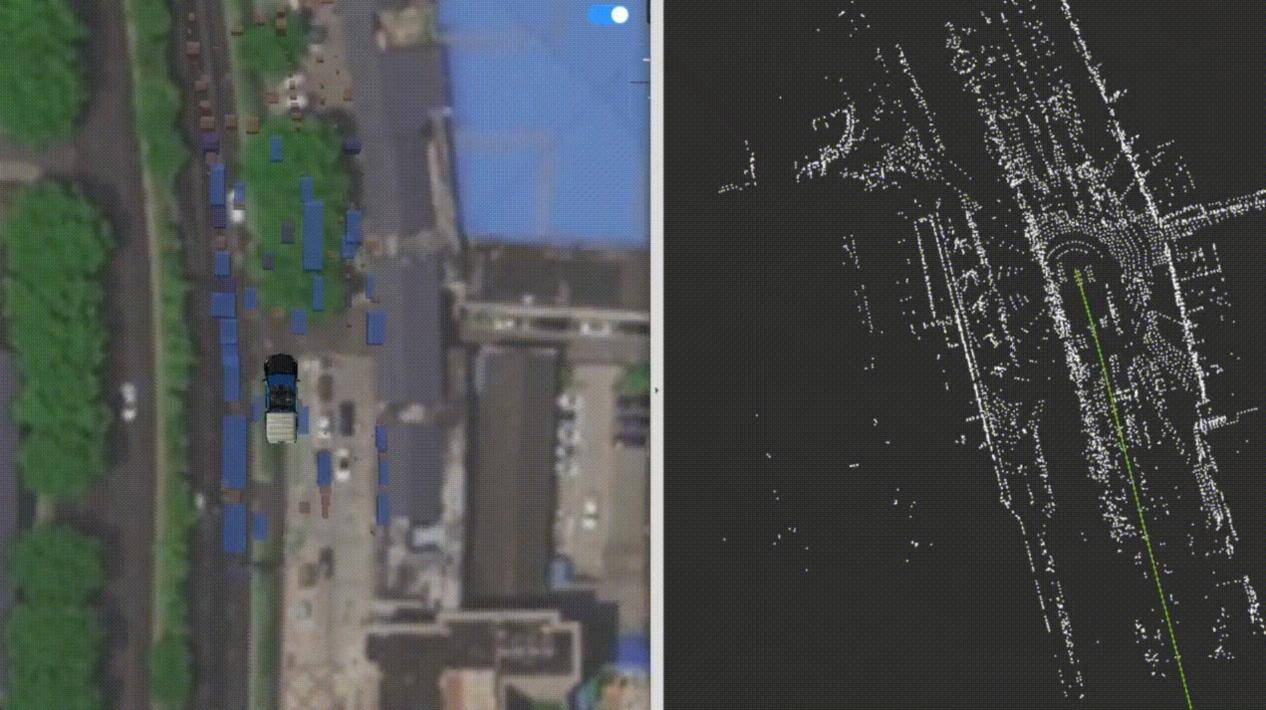
3. 同步定位与地图构建(SLAM):结合多种传感器数据,无人车辆在移动过程中实时构建地图并定位自身位置。
三、算丰征途无人车自主全局定位技术的应用:
1、有人驾驶:在无法依赖卫星导航的情况下,驾驶员可以利用算丰征途无人车自主全局定位技术提供的辅助信息,结合地图和其他传统导航手段,进行路线规划和位置判断。
2、无人驾驶:无人车辆依赖的定位系统来执行任务。算丰征途无人车自主全局定位技术可以为无人车提供一种独立的定位手段,即使在卫星信号丢失的环境中,也能保持其导航和任务执行能力。

算丰征途无人车拒止条件定位技术目前处于国内行业前沿,它不仅能够提升战时车辆的生存能力和作战效率,还能在民用领域发挥巨大作用,如灾难救援、偏远地区探索等。

免责声明:本文仅代表作者个人观点,与每日科技网无关。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。
本网站有部分内容均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,若因作品内容、知识产权、版权和其他问题,请及时提供相关证明等材料并与我们联系,本网站将在规定时间内给予删除等相关处理.
精彩推荐
-

-
采购拿回扣问题,教你一个小妙招,看看怎么做!
2017-09-18 11:09 广告 阅读
-

-
苦逼的老板,教你一个小妙招,怎么防采购拿回扣!
2017-09-18 11:09 广告 阅读
-

-
传播易荣获2024“最大的户外广告采购平台”荣誉
2024-06-25 10:45:19 更新 阅读
-

-
尖货爆料!速来【数码预爆台】领取618福利和AI新
2024-06-21 18:33:22 更新 阅读
-

-
喜获国际设计大奖丨十字勋章减重大师Pro商务背包
2024-06-12 14:04:28 更新 阅读
-

-
Baseus倍思音频品鉴会:一场产品与技术的对话
2024-05-29 11:13:32 更新 阅读
-

-
212携手极致军工品质,焕新出发
2024-05-22 21:16:00 更新 阅读
-

-
第四届全球应用算法BPAA大赛再度升级,增添三大
2024-05-17 17:55:36 更新 阅读
-

-
三维天地助力实验室质量管理工作无纸化、流程化
2024-05-09 15:35:04 更新 阅读
